Hazer and Tumbleweed have challenged my capabilities as an embedded software developer. The artifacts that have come out of those projects include a Network Time Protocol (NTP) server with a cesium atomic clock, and a Differential GNSS (DGNSS) system that has the potential to achieve accuracies at the centimeter level or better from a technology - GPS - that fundamentally is limited to accuracies of about five meters or so. At the beginning of both of these efforts I pondered how I was going to test them. Projects which, if they were successful, would result in devices that could measure time and space to a resolution far better than any measurement instrument I owned, could afford, or could borrow.
In this longish article I will try to describe the difficulties in testing the DGNSS system that came out of Tumbleweed, and how I tried - with varying amounts of success - to address them.
You can click on any image to see a larger version. A list of references and sources for this work can be found in the README file in the Hazer repository on GitHub.Precision versus Accuracy
There are two basic and different aspects to measuring systems like Tumbleweed: precision and accuracy. The classic way in which the difference between precision and accuracy is explained is this:
An archer shoots arrows at a target. If an arrow lands right in the bullseye, the archer is said to be accurate. If all of the arrows land near the same spot on the target (but not necessarily in the bullseye), the archer is said to be precise. Accuracy is about correctness. Precision is about consistency. The archer wants to be both accurate and precise.
You can see how this applies to devices like clocks. A precise clock strikes noon at the exact same time every day. An accurate clock strikes noon when it really is noon. You'd like a clock to be both accurate and precise.
As we will see, measuring the precision of Tumbleweed is fairly straightforward. Trying to measure its accuracy dropped me down a rabbit hole from which I am still trying to extricate myself. It launched me into a self-study program into the science of geodesy:
Geodesy is the science of accurately measuring and understanding three fundamental properties of the Earth: its geometric shape, its orientation in space, and its gravity field— as well as the changes of these properties with time. [NOAA]It also unexpectedly required that I learn a little bit about surveying:
Surveying or land surveying is the technique, profession, art and science of determining the terrestrial or three-dimensional positions of points and the distances and angles between them. A land surveying professional is called a land surveyor. These points are usually on the surface of the Earth, and they are often used to establish maps and boundaries for ownership, locations, such as building corners or the surface location of subsurface features, or other purposes required by government or civil law, such as property sales. [Wikipedia]To fully appreciate how deep this rabbit hole is, a little context is in order.
Background
Positions on the Earth are traditionally measured in terms of latitude and longitude.
Latitude is the number of degrees north or south a location is from the Equator. The Equator is the circumferential waist of the Earth as defined by its axis of rotation. While there might be come variation about where exactly the Equator is - its position drifts about nine meters or thirty feet per year as the Earth wobbles - it is a natural reference point from which to measure latitude. The Equator is zero degrees (0°). and is a great circle: a circle whose plane passes through the center of the Earth (a position that is, however, not nearly so well defined as you might think). Locations north of the Equator are between 0° (the Equator) and 90° north (the North Pole), and locations south of the Equator are between 0° and 90° south (the South Pole). (Sometimes southern latitudes are represented as negative values.)
Longitude has no such natural reference. The arbitrary establishment of a Prime Meridian, the meridian or circumferential line (also a great circle) from the North Pole to the South Pole which defines zero degrees longitude, was, for a long time a matter of heated debate during the Age of Sail. And also, it must be said, of national pride amongst the seafaring superpowers that depended on accurate compasses, maps, and clocks in order to navigate with sufficient skill to loot the New World and enslave its inhabitants.

In 1884, the Prime Meridian was established by international treaty as running through the Royal Observatory in Greenwich England. The Royal Observatory was one such place where astronomical observations were made with sufficient accuracy to set clocks that could be used to navigate at sea, using them to measure longitude comparing the time on the clock on board a ship with local noon, when the Sun was at its highest point in the sky, or with other astronomical objects like the North Star.

This Prime Meridian was the standard for many decades, despite the disgruntled French who thought the Prime Meridian should run through Paris. Locations east of the Prime Meridian are said to be between 0° and 180° east, and locations west are between 0° and 180° west. (Sometimes western longitudes are represented as negative values, although in some contexts I have seen eastern longitudes represented negatively.)

In 1973, the International Earth Rotation and Reference Systems Service (IERS), the same organization that inserts and potentially removes (although that has never happened) leap seconds into the accepted definition of Universal Coordinated Time (UTC) to keep clocks in sync with changes in the rotation of the Earth, established a new Prime Meridian. It based this new Prime Meridian on the latest scientific data at the time, much of it based in satellite observations, regarding the shape of the Earth and its center of gravity. This new Prime Meridian, which is also the GPS Meridian, is on a lawn about one hundred meters east of what is now referred to as the Greenwich Meridian, where I am standing in the photograph above, with the GPS Test Plus app on my iPhone. (Photo credit: Mrs. Overclock.)

The Greenwich Meridian, where I took the screenshot above, is about six seconds longitude west of the GPS Meridian.
Latitude and longitude are not the only coordinate systems in broad use today. The U.S. military uses the Military Grid Reference System (MGRS). This system lays down a grid of equal sized squares, the standardized size of which depends on the resolution of the map in question. MGRS lacks the sometimes problematic effect that longitude lines get closer together as you approach either pole, so that the distance between degrees of longitude ranges from just over 111 kilometers at the Equator to zero at either pole. (Degree of latitude are always sixty nautical miles apart by definition.) Many GPS receivers can be switched to display using MGRS.
While latitude and longitude are commonly used in civilian applications, including land surveying and sea navigation, there are different systems used for measuring latitude and longitude, and these systems do not yield the same results. This is due to the fact that they use different models, or datums, of the shape of the Earth. Things would be far simpler if the Earth were perfect sphere. And indeed, for short-ish distances, such an assumption served ancient mariners well. But the Earth is an oblate spheroid or ellipsoid, bulging with middle-age spread at its Equator, and flattened at either pole with the geodesic equivalent of male pattern baldness.
In 1901, the geodetic center of the United States was defined by the U.S. National Geodetic Survey (NGS), an agency of the U.S. government established in 1807, to be on Meade's Ranch, Kansas, a location that is today on private property. Since then, all land surveying in the continental United States has been done relative to this marker. Every single surveyed location is traceable through a chain of surveyor measurements and established benchmarks that eventually lead to the marker at Meade's Ranch.
In time, the NGS defined the North American Datum of 1927 (NAD27). You still see references to this abstract model of the shape of the earth and its center of gravity in old surveying documents today.
In 1983, a new, more accurate datum, NAD83, was adopted by the NGS. It was based on far more accurate measurements, mostly done from satellite observations, and it became the standard for all surveying in the United States today. (In between NAD27 and NAD83 there were other datums, just as one day, perhaps relatively soon, NAD83 will be replaced with an even more accurate datum.)
NAD83 is based relative to the North American tectonic plate. Because the North American tectonic plate moves at a rate of over two centimeters per year (and the Pacific plate, on which part of California sits, as much as seven to eleven centimeters per year), measurements made using NAD83 do not change (much) as the tectonic plate takes its leisurely stroll over a thick layer of lubricating rock.

"Much" because the NGS survey markers - typically inscribed cast metal disks embedded in concrete pillars or in sidewalks - are often embedded in ground which moves relative to local landmarks just due to smaller, local shifts in the ground. Or, as I like to say, "Shift happens".

(Local municipalities will also establish their own survey markers, sometimes fiberglass embedded in concrete.)
The use of relatively local coordinate systems on which to base latitude and longitude is quite common, and especially important in locales in which there is a lot of continental drift due to tectonic movement. New Zealand resides on two different tectonic plates, the Australian plate (the North Island and the western part of the South Island) and the Pacific plate (the rest of the South Island). The Pacific plate rotates counter-clockwise compared to the relatively stable Australian plate, making surveying in New Zealand especially challenging.
In 1984, the U.S. National Geospatial-intelligence Agency (NGA) established the World Geodetic System (WGS84). This is the datum on which GPS is based. The NGA is responsible for, amongst other things, providing accurate maps to the U.S. Department of Defense. WGS84 creates yet another coordinate system, but unlike NAD83, this one one is not relative to a tectonic plate, but is instead a global coordinate system. Because WGS84 deliberately does not take plate tectonics into account, GPS coordinates of a particular location may change (slowly) over time as the continental plate drifts. But because GPS coordinates can be made so swiftly - in minutes or seconds instead of hours or days required for expensive manual surveying - this isn't generally an issue.
However, this means that the GPS coordinates - made using WGS84 - of an NGS marker - whose position was originally determined using NAD83 - cannot be directly compared. Worse yet, any conversion between WGS84 and NAD83 has to take the date the measurements were made into account in order to adjust for continental drift.
Now that we've covered all the stuff I had to learn and worry about regarding exactly what the results from measurements I did with Tumbleweed even mean, we're ready to talk about what metrics of quality I used and what tools I used to measure and analyze them.
Quality Metrics
The gpstool command line utility is the Swiss Army knife of Hazer. It parses the output of the ZED-F9P module using the functions in libhazer: National Marine Equipment Association (NMEA) 0183 sentences, the most typical output of GNSS receivers, are parsed by the Hazer functions; proprietary u-blox binary messages in UBX are parsed by the Yodel functions; packets conforming to the Radio Technical Commission for Maritime Services (RTCM) Special Committee (SC) 104 standard are parsed by the Tumbleweed functions.
When used with the ZED-F9P (and many other u-blox GNSS receivers), gpstool configures the module to emit the proprietary High Precision Geodetic Position Solution (UBX-NAV-HPPOSLLH) message, a UBX message with a higher precision latitude, longitude, and altitude than is typically available via NMEA. The message also includes a Horizontal Accuracy Estimate and a Vertical Accuracy Estimate in units of one-tenth of a millimeter. How these estimates are computed isn't documented (that I've found). But it is plausible that the ZED-F9P could base these metrics on how closely it was able to bring the range spheres using the iterative least squares algorithms before the range spheres began to move away.
HPP 39.821674271 -105.095174932 ± 0.0141m
HPA 1722.1183m MSL 1700.5934m WGS84 ± 0.0100m
The High Precision Position (in decimal degrees) and the High Precision Altitude (in meters), along with the accuracy estimates (in meters), are displayed in real-time by gpstool as the HPP and HPA output lines. The HPA line includes both the altitude above Mean Sea Level (MSL) and above the WGS84 ellipsoid (WGS84). The HPP line is formatted such that the coordinates can be cut and pasted directly into Google Maps. The example above is from an actual field test of a Tumbleweed Rover receiving differential corrections from a Tumbleweed Base.
The Horizontal and Vertical Accuracy Estimates provide a self-reported metric of quality for the ZED-F9P, although since the module doesn't know what the actual coordinates are, I'm not sure you can actually call these metrics a measure of "accuracy". But given that uncorrected GPS under the best circumstances is accurate to about five meters or about fifteen feet, and under poor circumstances a lot worse, small numbers for these metrics are a good thing. Note in the example above that the horizontal accuracy estimate is 1.41 centimeters (a little over half an inch), and the vertical accuracy estimate is 1.00 centimeters (less than half an inch).
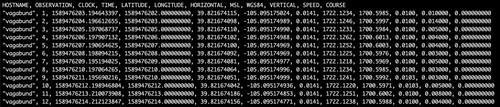
gpstool has the option (-T) of appending each instance of the high precision solution, along with the GPS Time, to a Comma Separated Value (CSV) file. The ZED-F9P is configured by gpstool to emit a high precision solution once a second (one hertz). The CSV file simplifies analysis with Excel or other tools, especially when looking at how the position solution changes over time.
The geodesic command line utility in Hazer computes the shortest distance between two sets of latitude and longitude coordinates as measured on the surface of the WGS84 ellipsoid. It is implemented using code borrowed from the GeographicLib library developed by Charles F. F. Karney and licensed under the MIT/X11 License. geodesic is useful for comparing coordinates generated with Tumbleweed with those from other sources like professional differential GNSS hardware and from NGS benchmarks, and can be used to assess both the precision and accuracy of the device.
The haversine command line utility in Hazer is similar to geodesic except that it uses the simpler Great Circle Route algorithm, from spherical trigonometry, that assumes that the Earth is a perfect sphere. For small distances it produces comparable results. For large distances, the output of the two utilities typically differ significantly. (I haven't used haversine since I wrote geodesic.)
The csvlimits command line utility in Hazer reads a CSV file from standard input and displays the minimum longitude value, the minimum latitude value (not necessarily from the same sample), the maximum longitude value, and the maximum latitude value (ditto). These values form the opposite corners of a square which bounds all of the latitude and longitude coordinates in the CSV file. It can also be thought of as a diameter defining a (slightly larger) circle. All of the positioning solutions will fit within the square/circle. Using the geodesic utility on these synthesized minimum and maximum coordinates gives a measurement of the precision of the module in different circumstances when it is stationary.
The NGS NGSDataExplorer is a web-based tool that gives you access to the NGS online database of documented survey markers. The tool provides a graphical map location of the marker and access to the official data sheets describing the marker, its location, and how it was surveyed. This can be used, with some conversion, to compare the NGS coordinates with that of the device.
The mapstool command line utility in Hazer coverts coordinates in a variety of formats, including those used in the NGS data sheets, into a decimal degrees form that can be used with geodesic, HTDP, Google Maps, and Google Earth.
High Precision Position: 39.794275645, -105.153414843
Horizontal Accuracy Estimate: 0.0204m
High Precision Altitude: 1708.4968m MSL 1686.9969m WGS84
Vertical Accuracy Estimate: 0.0144m
These are the coordinates of the skylight above my kitchen, near the peak of the roof, although Google Maps places it just to the upper left of the skylight. Whether this is a measurement error in the survey-in process or some slop in Google Maps is an open question.
Precision and Absolute Accuracy

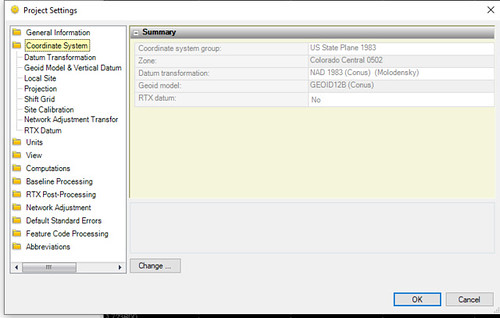
39 49 17.98157(N) 105 05 42.59638(W)HTDP converts those NAD83 coordinates into following WGS84 coordinates (also in NGS data sheet format).
39 49 17.99968(N) 105 05 42.64410(W)mapstool converts those coordinates from NGS data sheet format into decimal degrees.
39.821666578, -105.095178917

The stationary Rover antenna was centered directly over the KK1446 and twenty minutes of data was collected, yielding over a thousand data points in the CSV file. Precision was determined using csvlimits and geodesic to compute the diameter of the enclosing circle (or square). Absolute accuracy was determined using geodesic to compute the distance between the coordinates of the marker (converted into WGS84) and the high precision position determined by the ZED-F9P.
Two tests were run: one using corrections from the Base, and one with no corrections. The CSV files from each test were converted using csv2kml and imported into to Google Earth. The corrected test run is precise enough that you'll need to click on the images to see a larger version in order to see the red plot made by Google Earth; blowing up the images any more blurs the detail.

Date: 2020-05-14
Location: NGS KK1446
Configuration: Corrected Rover
High Precision Position: 39.821674271, -105.095174932
Horizontal Accuracy Estimate: 0.0141m
High Precision Altitude: 1722.1183m MSL 1700.5934m WGS84
Vertical Accuracy Estimate: 0.0100m
Precision: 0.0423m
Accuracy: 0.9198m

Date: 2020-05-18
Location: NGS KK1446
Configuration: Uncorrected Rover
High Precision Position: 39.821671099, -105.095169044
Horizontal Accuracy Estimate: 0.4327m
High Precision Altitude: 1724.6724m MSL 1703.1475m WGS84
Vertical Accuracy Estimate: 0.6372m
Precision: 0.6925m
Accuracy: 0.9831m
The precision - the diameter of the circle in which all of the position solutions lie - of the corrected Rover test is a little over four centimeters. This is not as good as I had hoped (my original goal was to get within 2.5 centimeters or about an inch), but far better than the uncorrected precision which was almost seven-tenths of a meter or more than two and a quarter feet.
The accuracy - how far the computed WGS84 coordinates differ from the surveyed NAD83 coordinates converted to WGS84 - of the corrected Rover is not that great: nine-tenths of a meter, and not that much better than the uncorrected Rover.
Since I don't know exactly how the ZED-F9P computes its own accuracy estimates, I'm not sure how to compare them with my own quality metrics.
I would be tempted to blame the multi-step conversion process I used to get WGS84 coordinates of KK1446 that I could directly compare with my own results, had not a chance meeting occurred.

During one of my field tests in October 2019 I discovered I wasn't the only person that liked using NGS KK1446 for testing their GNSS equipment: I had to share the spot with a professional surveyor who showed up to check his own equipment as part of a job. He very graciously shared the results from his high-zoot survey-quality Trimble GNSS with me. I confess to a certain amount of equipment envy.
One of the advantages of professional equipment is his Trimble displayed its GNSS measurements using the NAD83 datum, standard in the surveying field, instead of WGS84, the standard for GPS.
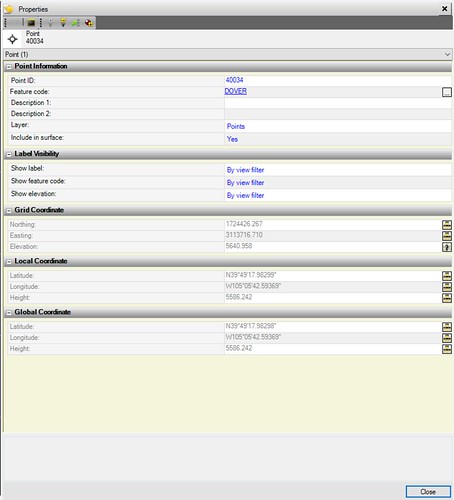
Taking the Trimble's NAD83 coordinates, using the HTDP web tool to convert them to WGS84 coordinates, then using geodesic to compute the distance between those coordinates and the KK1446 coordinates converted to WGS84 (because geodesic assumes WGS84) yields a difference of 0.0307 meters or about three centimeters. That's very good, and far better than what I've been able to achieve.
Relative Accuracy

I measured relative accuracy by building a test fixture. I used a sheet of plywood on which I marked off, as carefully as I could with a square and a meter tape, one square meter. I got the board approximately level using a torpedo level and some makeshift leveling blocks.

I set my Rover in its sunshade and on its stand on the board (which wasn't really necessary for the results, but allowed me to reach all four corners of the meter square without using more coax cable). I collected five minutes of data at each corner, keeping the antenna as motionless and level (using a circular level built into the pole) as possible. I repeated the cycle of all four corners twice.
The geodesic measurement between successive corners ranged from 0.9810 meters to 1.010 meters with a mean of 0.9939 and a standard deviation of 0.0101 (computed using Excel). That's pretty good; much of the variation may be a result of my own inability to lay out a perfect square meter on a sheet of plywood and to hold the survey pole with the antenna steady while my neighbors watch me with their usual curiosity. My original goal was an accuracy of 2.5 centimeters or about an inch, and this falls well within that.
The title of this article came from a remark my thesis advisor Bob Dixon made thirty-seven years ago, when I was working on my master's thesis in computer science at Wright State University in Dayton Ohio.
My original goal for this project was to see if consumer grade differential GNSS technology was precise enough for applications like agriculture: self-navigating tractors, etc. The results indicate that the ZED-F9P is indeed capable of precise, self-consistent, repeatable geolocation, and that the use of differential corrections from a base station also equipped with a ZED-F9P makes a significant measurable difference.
I was disappointed in its accuracy results when trying to duplicate the coordinates of surveyed markers like KK1446. There are a lot of reasons why this lack of accuracy may have been the case, although the success of the Trimble in this regard makes me think better accuracy should be achievable (and that you get what you pay for). It's possible that I need a better antenna, or that there's a mistake in my own calculations. (While some of the tools I wrote for Tumbleweed use double precision floating point, gpstool and the functions it uses in libhazer that parse the output of GNSS devices use only integer arithmetic, even though the displayed values may appear to be decimal. I have also tried to keep track of the significant digits in various internal calculations.)
I keep alluding to the important of antenna selection and placement in achieving good results with GNSS, whether or not differential corrections are being used. This will be the topic of an upcoming article.
Acknowledgements
Thanks to Charles Karney, who wrote GeographicLib and open sourced it, and of which I used only a tiny part in my geodesic computations.
Thanks to Brad Gabbard of Flatirons, Inc., a surveying, engineering, and geomatics firm based in Boulder Colorado, who graciously put up with the old guy and his a tub of improvised equipment, and who so generously shared his results with me.


No comments:
Post a Comment